Rotaties
Overzicht ][ Draaivermenigvuldiging | Meetkunde
Zie ook de pagina "Bewegingen".
| . |
| Stelling 1 Zijn F en F' elkaars rotatiebeeld bij een rotatie met centrum O en hoek a, dan zijn overeenkomstige lijnstukken van deze figuren gelijk en maken een hoek a. |
Bewijs:
| figuur 1 |  |
In de figuur hiernaast is ÐAOB=ÐA'OB', immers ÐAOA'=ÐBOB'=a. A' en B' zijn het beeld van A resp. B, zodat OA=OA' en OB=OB'. Dus zijn de driehoeken AOB en A'OB' congruent (ZHZ), waaruit volgt, dat AB =A'B' (overeenkomstige lijnstukken). m en m' zijn drager van opvolgend AB en A'B'. n staat loodrecht op m, n' staat loodrecht op m'. OAP en OA'P' zijn congruent (ZHH), waaruit volgt dat OP=OP' en ÐAOP=ÐA'OP'. Uit dit laatste volgt dan ÐPOP' = a. |
In koordenvierhoek OPSP' is een hoek bij S dus gelijk aan a.¨
Omgekeerd:
| Stelling 2 Als met elk punt van een figuur F een punt van een andere figuur F' correspondeert en corresponderende lijnstukken van deze figuren gelijk zijn en een hoek a met elkaar maken, dan is F' het beeld van F bij een rotatie over a. |
Bewijs:
| figuur 2 |  |
Construeer een cirkel waarvan MM' een hoek a
onderspant. Zij O het snijpunt van de middelloodlijn van MM' en de cirkel zodanig, dat MOM' gelijk is aan a. De rotatie R(O, a) beeldt nu M op M' af. Zijn A en A' twee corresponderende punten. We moeten nu aantonen, dat ÐAOA'=a. In de driehoeken MAO en M'A'O hebben we: (1) OM=OM' (door constructie); (2) MA=MA' (gegeven); (3) ÐOMA=ÐOM'A' |
(3) volgt uit het feit, dat de punten M, M', S (als snijpunt van MA en M'A') en O
concyclisch zijn.
De driehoeken MAO en M'A'O zijn dus congruent, zodat OA=OA' en verder ÐAOM=ÐA'OM'. Uit dit laatste volgt dan ook ÐAOA'
= ÐMOM' = a.
Zodat een willekeurig punt A van F door R(O, a) op een
overeenkomstig punt A' van F' wordt afgebeeld. Waaruit het gestelde volgt.¨
2. Som van twee
rotaties ![]()
We maken onderscheid tussen gemeenschappelijke centra en verschillende
centra.
2.1. Gemeenschappelijke centra
Uit de definitie van rotatie volgt eenvoudig dat de som (zie Opmerking)
van twee rotaties met gemeenschappelijk centrum O en hoeken a
en b de rotatie R(O, a + b) is.
Opmerking
Onder de som verstaan we het na elkaar uitvoeren van twee rotaties R1
en R2.
Passen we eerst R1 toe op een punt X en vervolgens R2
op het beeld van X, dan schrijven we dit als
R2R1(X) of ook wel R2oR1(X),
waarbij de operator "o" wordt uitgesproken als "na".
[einde Opmerking]
2.2. Verschillende centra
We gaan uit van de figuren F, F1 en F2
waarbij R1(F)=F1 en R2(F1)=F2
over respectievelijk de hoeken a en b.
Lijnstukken AB van F gaan door R1 over in gelijke lijnstukken A1B1
van F1 waarbij de hoek tussen AB en A1B1
gelijk is aan a.
Lijnstukken A1B1 van F1 gaan door R2 over in
gelijke lijnstukken A2B2 van F2 waarbij de hoek tussen A1B1
en A2B2 gelijk is aan b.
De hoek tussen corresponderende lijnstukken AB en A2B2 van F en F2
is dus gelijk aan a+b, waarbij ook AB=A2B2.
[1] a+b = 360º
Nu is AB//A2B2.
In dit geval is er dus sprake van een translatie indien de som geen
dekpunten heeft.
Zijn er wel dekpunten, dan is de som de identieke afbeelding.
[2] a+b ¹ 360º
Uit Stelling 2 volgt in dit geval, dat R2R1 een rotatie is
over de hoek a+b.
Omdat een rotatie over een hoek a gelijk is aan een rotatie over de hoek
360º - a (tegengestelde richting) kunnen we algemeen formuleren:
| Stelling 3 De som van twee rotaties is een translatie als de rotatiehoeken gelijk zijn maar tegengesteld en is een rotatie in andere gevallen. |
3.
Centrum van de som ![]()
Zijn O1 en O2 de centra van de
rotaties R1 en R2, met hoeken a
en b, waarbij a+b ¹ 360º.
Voor O1 hebben we O1' = R2R1(O1),
waarbij O1O1' = O1O2
en ÐO1O2O1' = b
(zie figuur 3).
Voor een zeker punt A hebben we verder R2R1(A)
= O2 met O1A=O1O2.
| figuur 3 |  |
Voor het centrum O van de rotatie R2R1
geldt dan: - O op de middelloodlijn van O1O1' - O op de middelloodlijn van AO2. O is dus het snijpunt van beide middelloodlijnen. Klik hier Opmerking |
Voor a + b =360° (of b =360° - a = rotatiehoek over -a) hebben we (zie figuur 4):
| figuur 4 |  |
Wegens de rotaties over tegengestelde hoeken is nu: O1O1' // OO2. De middelloodlijnen van deze lijnstukken zijn dus evenwijdig. Het centrum van de som is in dit geval dus een oneigelijk punt (het oneigenlijk snijpunt van de beide middelloodlijnen). We hebben dus een translatie over een vector waarvan de lengte gelijk is aan twee keer de afstand tussen die middelloodlijnen. |
4. Sylvester's
Rotator ![]()
James Joseph Sylvester (1814-1897, Engeland) vond rond
1870 een stangenmechanisme (Eng. linkage) uit, waarmee het mogelijk is een figuur te
roteren.
De "rotator" is gebaseerd op een scharnierende ruit met twee extra stangen
waarvan de lengte gelijk is aan de zijde van de ruit (zie figuur 5).
| figuur 5 |  |
De punten O, A, B, C zijn scharnierend. De hoeken PCB en P'AB zijn gelijk en vast. Het geheel draait om het vaste punt O. Indien P figuur beschrijft, dan beschrijft P' een daarmee congruente figuur die om O geroteerd is. Klik hier |
| figuur 6 |  |
In figuur 6 is een vierhoek (waarop P gelegen is) met behulp van de
rotator gedraaid. Opmerking |
| figuur 7 |  |
Indien de driehoeken PCB en BAP' gelijkvormig zijn, is er sprake van een draaivermenigvuldiging tov. het punt O (zie figuur 7). De vermenigvuldigingsfactor is dan gelijk aan BA/PC (de factor van PCB naar BAP'). Klik
hier |
| [1] | Cabri Java Applets - Jen-Chung Chuan, National Tsing Hua University (Taiwan) | 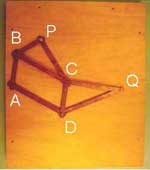 |
| [2] | Linkages - Leo Dorst, UvA | |
| [3] | Pantographs - Museo Unimo, Italië (zie illustratie hiernaast) | |
| [4] | Meer over Sylvester - GMFW, KUN | |
| [5] | Pantograph of Sylvester - Geometry in Motion (Daniel Scher, USA) |
Zie ook de pagina "Peaucellier-cel".
Zie ook de pagina "Draaivermenigvuldiging"
Zie ook de pagina "Cardioïdes met
stangenmechanisme"
![]()
[rotaties.htm] laatste wijziging op: 05-09-05